Next: Análise em Variedades
Up: Espaço Euclideano
Previous: Formas diferenciais
Nesta seção discutimos funções de  em
em  . A
observação fundamentalsobre a função
. A
observação fundamentalsobre a função
 é que ela pode ser completamente descrita por
é que ela pode ser completamente descrita por  funções de
funções de
 .
.
7.1 Definição Dada uma função
, sejam  ,...
,... funções reais definidas em , tais que
funções reais definidas em , tais que
para todo  de . Essas funções chamam-se
funções coordenadas euclideanas de
de . Essas funções chamam-se
funções coordenadas euclideanas de  , e é costume
escrever-se:
, e é costume
escrever-se:
 .
A função é diferenciável se suas funções
coordenadas o forem. Uma função diferenciável
é chamada de mapeamento
de em . Note que
.
A função é diferenciável se suas funções
coordenadas o forem. Uma função diferenciável
é chamada de mapeamento
de em . Note que
 .
.
7.2 Definição Se
 é uma curva em e
é um mapeamento,
então a função composta
é uma curva em e
é um mapeamento,
então a função composta
 é uma curva em denominada
imagem de
é uma curva em denominada
imagem de  sob .
sob .
7.3 Exemplo
(1) Considere o mapeamento
 tal
que
tal
que
ou, mais precisamente,
Este mapeamento é muito simples porque é linear. Neste caso é
sabido que é completamente determinado pelos seus valores em
três pontos linearmente independentes, como, por exemplo,
(2) O mapeamento
 tal que
tal que
onde  e
e  são as funções coordenadas de
são as funções coordenadas de  .
Para analisar este mapeamento, vamos examinar o seu efeito sobre a
curva
.
Para analisar este mapeamento, vamos examinar o seu efeito sobre a
curva
Esta curva descreve, em sentido antihorário, um arco de círculo
de raio  com centro na origem. A curva imagem é
com centro na origem. A curva imagem é
Portanto,
Esta curva descreve dois arcos de círculo, em sentido
antihorário, em torno da origem e de raio  .
Em linhas gerais, o cálculo diferencial aproxima objetos contí
nuos por objetos lineares. Nesta linha, dado um mapeamento
, vamos definir uma aproximação linear para
ele, perto de um ponto
.
Em linhas gerais, o cálculo diferencial aproxima objetos contí
nuos por objetos lineares. Nesta linha, dado um mapeamento
, vamos definir uma aproximação linear para
ele, perto de um ponto
 .
É possível atingir todos os pontos de através de retas
.
É possível atingir todos os pontos de através de retas
 , partindo de e escolhendo adequadamente
, partindo de e escolhendo adequadamente
 e
e  . Da mesma forma pode ser ``varrido'' pelas imagens de
por , ou seja,
. Da mesma forma pode ser ``varrido'' pelas imagens de
por , ou seja,
começando em  . Vamos aproximar nas vizinhanças de
pelo mapeamento
. Vamos aproximar nas vizinhanças de
pelo mapeamento  , que leva cada velocidade inicial
, que leva cada velocidade inicial
 na velocidade inicial
na velocidade inicial
 .
.
7.4 Definição Seja
um mapeamento.
Seja  um vetor tangente a em , e denotemos por
um vetor tangente a em , e denotemos por
 a velocidade inicial da curva
a velocidade inicial da curva
A função resultante leva vetores tangentes a em vetores tangentes
a , e é chamada mapeamento tangente de .
7.5 Proposição Seja
 um
mapeamento de em . Se é um vetor tangente
a em , então
um
mapeamento de em . Se é um vetor tangente
a em , então
Prova: Vamos tomar  para fixar as idéias. Então
para fixar as idéias. Então
Por definição ,
 . Para obter
,
derivamos, em
. Para obter
,
derivamos, em  , as funções coordenadas de
, as funções coordenadas de  . Mas
. Mas
Logo,
e
 .
.
7.6 Corolário Se
é um mapeamento,
então em cada ponto de , o mapeamento tangente
é uma transformação linear.
Prova: Temos que mostrar que, para ,  ,
,
 ,
,  arbitrários,
arbitrários,
De fato, o mapeamento tangente  em é a transformação
linear que melhor aproxima nas vizinhanças de .
em é a transformação
linear que melhor aproxima nas vizinhanças de .
7.7 Corolário Seja
um mapeamento. Se
 é a imagem da curva em , então
é a imagem da curva em , então
 .
.
Prova:
Mas
logo,
Sejam  ,
,
 e
e
 ,
,
 os referenciais naturais de e respectivamente.
Então ,
os referenciais naturais de e respectivamente.
Então ,
7.8 Corolário Se
 é um mapeamento
de em , então
é um mapeamento
de em , então
Dem: Imediata, lembrando que
![$U_i[f_j]=\frac{\partial f_j}
{\partial x_i}$](img280.png) .
.
Seja  um espaço vetorial, com base
um espaço vetorial, com base  . Seja
. Seja
 um outro espaço vetorial, com base
um outro espaço vetorial, com base  . Seja
. Seja
 linear. Chama-se elementos de matriz de
linear. Chama-se elementos de matriz de  em relação
às bases e os números
em relação
às bases e os números  na equação
na equação
Logo, o Corolário 7.8 nos diz que, se
 , os elementos
de matriz de
, os elementos
de matriz de  em relação aos referenciais naturais de e
são , no ponto , os números
em relação aos referenciais naturais de e
são , no ponto , os números
 . Ou seja, a matriz que representa a transformação linear nessas
bases é a matriz jacobiana da função . Isto nos sugere outro nome
para : derivada de .
. Ou seja, a matriz que representa a transformação linear nessas
bases é a matriz jacobiana da função . Isto nos sugere outro nome
para : derivada de .
7.9 Definição Um mapeamento
é
regular se, para todo
, o mapeamento tangente
 for
for  (injetor).1
Como mapeamentos tangentes são lineares, segue diretamente da álgebra linear que as seguintes
condições são equivalentes:
(injetor).1
Como mapeamentos tangentes são lineares, segue diretamente da álgebra linear que as seguintes
condições são equivalentes:
(1) é injetora.
(2)
(3) A matriz jacobiana de em tem posto  (que é a dimensão
de ).
A seguinte propriedade de transformações lineares
será
útil:se os espaços vetoriais e têm a mesma dimensão , então
é injetora se e só se ela for sobrejetora.
Um mapeamento que tem um mapeamento inverso é chamado de
difeomorfismo. Lembre-se de que estamos exigindo de um mapeamento que seja
diferenciável. Quando considerarmos aplicações mais gerais, um difeomorfismo
será uma aplicação diferenciável que possui uma inversa também diferenciável.
(que é a dimensão
de ).
A seguinte propriedade de transformações lineares
será
útil:se os espaços vetoriais e têm a mesma dimensão , então
é injetora se e só se ela for sobrejetora.
Um mapeamento que tem um mapeamento inverso é chamado de
difeomorfismo. Lembre-se de que estamos exigindo de um mapeamento que seja
diferenciável. Quando considerarmos aplicações mais gerais, um difeomorfismo
será uma aplicação diferenciável que possui uma inversa também diferenciável.
7.10 Teorema: Seja
um mapeamento
entre espaços euclideanos de mesma dimensão . Se é injetora
em um ponto , existe um aberto  contendo
tal que a restrição de a é um difeomorfismo de
sobre um aberto
contendo
tal que a restrição de a é um difeomorfismo de
sobre um aberto  .
Este teorema, de demonstração difícil, é chamado de teorema
da função inversa.
.
Este teorema, de demonstração difícil, é chamado de teorema
da função inversa.
7.11 Definição Funções tangentes.
Seja
 um aberto;
um aberto;  um ponto de
um ponto de  e
e
contínuas em . Diz-se que  e
e  são tangentes em
se
são tangentes em
se
(1)
(2)

onde  é a norma do vetor
é a norma do vetor  (por exemplo, a norma
euclideana).
O nome se justifica. Tomemos, para simplificar, o caso em que
(por exemplo, a norma
euclideana).
O nome se justifica. Tomemos, para simplificar, o caso em que  . Então
o limite da definição diz que, se e são tangentes em , teremos,
próximo a ,
. Então
o limite da definição diz que, se e são tangentes em , teremos,
próximo a ,
e, para que
 , é preciso que
, é preciso que
 . Ou seja, nas vizinhanças de , as funções tangentes diferem
só a partir da segunda ordem em
. Ou seja, nas vizinhanças de , as funções tangentes diferem
só a partir da segunda ordem em  .
.
7.12 Proposição Suponhamos que, dentre as funções tangentes,
em , à função , existam duas funções lineares,  e
e  . Isto
é, suponhamos que
. Isto
é, suponhamos que
sejam tangentes a em . Então,  .
.
Prova:
(1) é tangente a (trivial).
(2) Temos, então ,
Introduzo  e
e  . Então ,
. Então ,
Isto quer dizer que, para qualquer  , existe
, existe  tal que,
se
tal que,
se  ,
,
 |
(4) |
Considere a seguinte escolha de  :
:
onde  é um vetor não -nulo qualquer. Temos
é um vetor não -nulo qualquer. Temos
e a Eq.(4) vale. Logo,
ou ainda
para  arbitrário e para todo
arbitrário e para todo  . Para
. Para  , temos
, temos
 . Para não -nulo, a desigualdade de cima exige .2 Logo,
para todo . Segue que
. Para não -nulo, a desigualdade de cima exige .2 Logo,
para todo . Segue que  , ou, . Em conseqüência a aplicação
linear tangente a uma função contínua em , se existir, é única.
, ou, . Em conseqüência a aplicação
linear tangente a uma função contínua em , se existir, é única.
7.14 Definição Dizemos que uma aplicação contínua
de
em é diferenciável no ponto  se existir
uma aplicação linear de
se existir
uma aplicação linear de
 tal que
tal que
 seja tangente a em . Acabamos de ver que esse
mapeamento, quando existe, é único. é denominado derivada
de no ponto , e é denotado por
seja tangente a em . Acabamos de ver que esse
mapeamento, quando existe, é único. é denominado derivada
de no ponto , e é denotado por  ou
ou  .
.
Exemplos:
1.A aplicação
 , de
, de
 é diferenciável.
Por que? Qual é a sua diferencial?
é diferenciável.
Por que? Qual é a sua diferencial?
A função pode ser escrita  . Ela é linear, pois
. Ela é linear, pois
Como é linear, ela coincide com a derivada. Então,  .
.
2.
 . Determinar a diferencial.
. Determinar a diferencial.
Para ser mais explícito, vou denotar por  . Considere a
aplicação
. Considere a
aplicação
Então temos
Para que seja a derivada de em  devemos ter
devemos ter
ou seja, que
nolimite em que
 é suficientemente pequeno. Isto é claramente
possível, pois, para
é suficientemente pequeno. Isto é claramente
possível, pois, para  e
e  suficientemente pequenos,
suficientemente pequenos,
Resta verificar, o que é muito simples e pode ser feito pelo leitor, que
é linear.
Uma vez que
 é linear, podemos calcular seus
elementos de matriz. Estes são obtidos aplicando aos
vetores de base de :
é linear, podemos calcular seus
elementos de matriz. Estes são obtidos aplicando aos
vetores de base de :
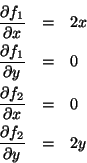
Note-se que
 , logo,
, logo,
The partial derivatives of and  are given by
are given by
Como podemos escrever
segue, usando os valores das derivadas parciais, que
de onde fica claro que as derivadas parciais são os elementos de
matriz
de .
3.
 , dada por
, dada por

Para que isto se anule devemos ter
ou seja, a derivada de  é a função linear
é a função linear
Normalmente dizemos que a derivada da função  no ponto
é o número . Isto não é inconsistente. De fato, no
espaço
vetorial
no ponto
é o número . Isto não é inconsistente. De fato, no
espaço
vetorial  , de uma dimensão, seja
, de uma dimensão, seja  o vetor da base
natural, e uma aplicação linear qualquer. Seja
o vetor da base
natural, e uma aplicação linear qualquer. Seja
 um vetor de . Temos
um vetor de . Temos
ou seja, uma aplicação linear
 consiste sempre em multiplicar o vetor sobre o qual ela atua por um
número, característico da aplicação, podendo-se então
identificar cada aplicação linear com um número. Na análise
clássica chama-se a esse número de derivada.
consiste sempre em multiplicar o vetor sobre o qual ela atua por um
número, característico da aplicação, podendo-se então
identificar cada aplicação linear com um número. Na análise
clássica chama-se a esse número de derivada.
7.15 Continuidade de uma aplicação linear
Sejam  e espaços vetoriais com normas definidas e uma
aplicação linear de em . Afim de que seja contínua, é necessário
e suficiente que exista
e espaços vetoriais com normas definidas e uma
aplicação linear de em . Afim de que seja contínua, é necessário
e suficiente que exista  tal que, para todo
tal que, para todo  ,
,
Dem;Elon Lages Lima, Análise Matemática II
7.16 Teorema Se a aplicação contínua de
em
é diferenciável no ponto , a derivada é uma aplicação linear
contínua de
.
Dem:A continuidade de significa que, dado , existe
![$r\in [0,1]$](img376.png) tal que
tal que
A diferenciabilidade em exige que, nas mesmas condições,
Ora,
logo,
e, tomando o máximo  ,
,
Conseqüentemente,
Tomando
 , com qualquer, temos
, com qualquer, temos
 . Logo,
. Logo,
 . Mas
. Mas
Logo,
para todo . A função é, então, contínua.
7.17 Teorema A regra da cadeia.
Sejam ,, três espaços vetoriais normados,
uma vizinhança aberta de
três espaços vetoriais normados,
uma vizinhança aberta de  , uma aplicação contínua de
em ,
, uma aplicação contínua de
em ,  ,
,  uma vizinhança aberta de
uma vizinhança aberta de  em , uma
aplicação contínua de em . Então, se é diferenciável em
e é diferenciável em , a aplicação
em , uma
aplicação contínua de em . Então, se é diferenciável em
e é diferenciável em , a aplicação  é
diferenciável em , e se tem
é
diferenciável em , e se tem
Dem:Too boring inequality juggling! (Dieudonné, Foundations of
Modern Analysis, Parágrafo (8.2.1), pg.151.)
Next: Análise em Variedades
Up: Espaço Euclideano
Previous: Formas diferenciais
Henrique Fleming
2002-10-02

![\begin{eqnarray*}
F_8(a\vec{v}+b\vec{w}) & = &
\left((a\vec{v}+b\vec{w})[f_1],...
...],...,\vec{w}[f_m]\right)\\
& = & aF_*(\vec{v})+bF_*(\vec{w})
\end{eqnarray*}](img267.png)
![\begin{eqnarray*}
m & = & 3\\
F & = & F(\alpha)=(f_1(\alpha),f_2(\alpha),f_3(...
...lpha^\prime[f_1],\alpha^\prime[f_2],
\alpha^\prime[f_3]\right)
\end{eqnarray*}](img271.png)


![\begin{eqnarray*}
f[(x,y)+(\overline{x},\overline{y})] & = & f[(x+\overline{x},...
...(x,y)]& = & f[(\lambda x,\lambda y)]=\lambda x = \lambda f(x,y)
\end{eqnarray*}](img341.png)